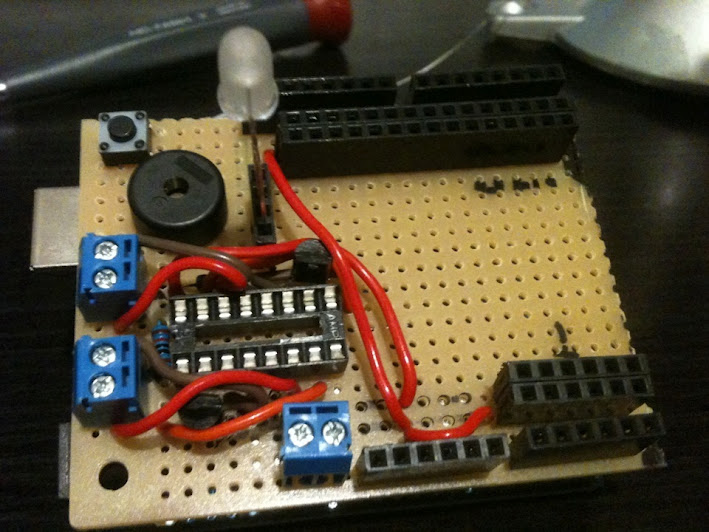
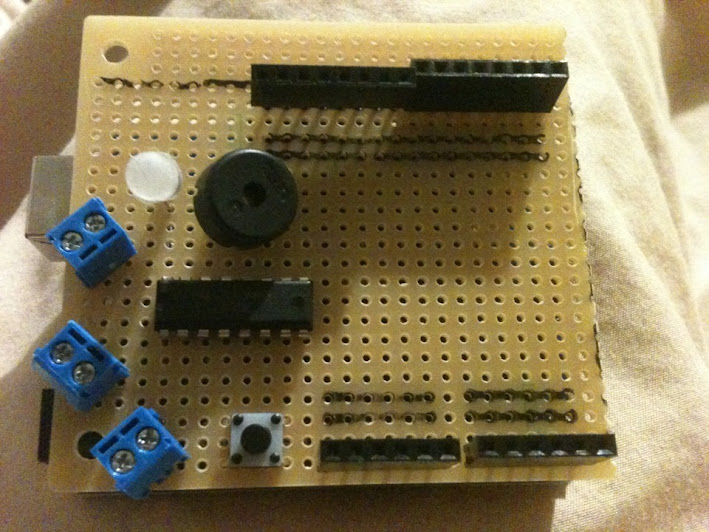
Here is the first set of components, connectors, and wire on the prototype RoboShield daughter-board for the Arudino microcontroller. The bottom-left quadrant of the board will be an h-bridge motor controller to drive two robot motors. Above that is a piezo buzzer and three-color RGB LED. The connector blocks on the uppper edge and the bottom right provide access to the Arduino’s input/output pins as well as ground and 5v buss lines to make interfacing sensors quick and easy. More on this soon…
Laying out the components for a robotics shield for the Arduino microcontroller.
Here is the first step in designing a robotics daughter-board (the RoboShield) for the Arduino microcontroller. I’m just laying out the components and marking things up in Sharpie to get a feel of how to use space on the tiny little board (it’s about the size of a business card).
Once this is designed and tested it will greatly simplify building the Ard-bots we use for the Arduino Robotics class.
Round 3 of the Intro To Arduino Class for L.A. Robotics Club
Last week’s class had such a turn-out that we had to split off a another session this weekend for 40 more students. It’s fantastic to see so many people interested in Arduino and microcontrollers / robotics in general. Teaching these back-to-back definitely helped me refine my presentation as well.
Here’s more student feedback:
I thoroughly enjoyed this class, and the level of professionalism in which it was presented. I appreciated the pace of the class, the constant check for any questions and/or extra needed help (and immediate help was offered). Thank you all who helped make this possible. I very much look forward to the next class with the L.A. Robotics Club. Again, thank you! – Brian J.
Great little introductory class. I was quite surprised at the turnout! – Guy
I really enjoyed the class. I look forward to an intermediate and advanced class. – Julie
Sorry that I was late, but the information and the pace of the instructor was spot on. – Michael C.
Awesome class, As an intro class I especially liked how no one was left behind. If some one was stuck, Michael made an effort to get the person up to speed. My friends and I are will defiantly attend the next arduino class. Thanks to Michael, Annika, Tim and the rest of the group. – Alexis A.
40 more students learning Arduino for the first time. This was my second time teaching the materials that will eventually be the YouTube tutorial videos. This one went really well and the new meeting space at Black Design Associates is awesome! Special thanks to Annika O’Brien, founder of the L.A. Robotics Club.
Here is some student feedback:
This was exactly the right level and pace for an intro Arduino class. I really enjoyed it and everybody was ready to learn. – Barry B.
Wow! What a great class. Michael is a fabulous instructor. Thank you Annika and Michael 🙂 Looking forward to learning more with you. – Staci T.
Fantastic class. Clear, concise, well thought out. Thanks! Can’t wait to continue. – Mosa K.
Except for a few times when it was too noisy to hear anything, it was the best ever. There was a lot of reasons why, not just do it this way. – Tim L.
Ard-bot: A complete robot kit for use with the Arduino microcontroller.
Just finished teaching a full-on robotics building class to 40+ students in Pasadena for the L.A. Robotics Club. This was a follow-up to last month’s Intro to Arudino class. Had a great time building table-top turtle robots using Arduino microcontrollers. The “Ard-bot” was a great success:
I had a great time. Everyone was extremely helpful, which was great, because it was the first robot that I had ever built. – Leonard R.
Well organized. Good pace. productive. Fun!! Where else can you get a working programmable robot in just a few hours? – David V.
The “Build a Robot” class was a fantastic idea to get beginners started on robotics. By the end of the day, I had built a robot on a platform can easily be extended with sensors and new movement patterns. Looking forward to more! – Gene D.
Best class yet – John W.
Great kit, instructions, and planning. Thanks to all the organizers. – Kevin C.
Discovering the joys of Arduino microcontroller programming.
I taught my first group of students today in a basic Intro to Arduino programming class. We had about 40 very enthusiastic students and were hosted by the L.A. Robotics Club. This is preparation for a series of tutorial videos I’m writing and the response was awesome. Here are some student quotes:
Very informative and a lot of fun. I have an arduino now, I learned a lot of basics, and I have some ideas about things to experiment with. Thanks! – Lance L.
Very well-paced and well thought-out learning experience. – Jacques D.
Great intro. I was a little intimidated, not having any Arduino experience, and hadn’t touched a bread board in 15+ years, but you guys made it easy to understand. Look forward to next one. – Alper A.
Perfect for anyone who has never touched an Arduino board before! – Camillle O.
Great intro class. I was able to follow along and feel confident. I’m really looking forward to the next class. I hope it is soon.
The pick of the crop of YouTube videos featuring Aldeberan Robotics’ NAO Robot
Aldeberan’s promotional video featuring NAO interacting with a person in various ways. Most likely none of these behaviours are fully formed or work exactly as shown. For instance it’s doubtful NAO can recognize his friend’s face from across a room in real life. Of particular interest is the section (starting at 2 minutes) where NAO walks, showing the original and the new optimized walking algorithms in one shot.
A demo of NAO by Aldeberan’s founder Bruno Masonnier. It’s his personal enthusiasm for robotics and the care they have taken in crafting NAO that makes me enthusiastic about the possibilities of developing for this platform. The interactions between Bruno and NAO are fairly natural at points. In particular watch NAO frustrated after Bruno tells him to be quiet.
NAO using the prototype self-charging station. Watch the disconnect behavior near the end for a treat.
Two NAOs interacting. A good video showing NAO grasping an object on the ground, walking, etc. and using a NAOcode marker on the trash can to locate it. Again some of this interacting is a bit “staged” (for instance can one NAO understand the other via voice alone?) but it’s a good indication of what NAO should be able to accomplish when fully programmed.
NAO executing the walk with me behaviour. Feedback from the arm is used to plan NAO’s path forward, back, and side-to-side.
NAO taking and handing back an object. While this looks trivial, notice the subtle interactions, checks, and balances that have been built into the process so both the robot and the human know what’s going on. This is the 5th version of this particular behavior. The older one’s are on youtube as well for comparison
NAO climbing a ladder. They admit that it’s a behavior built for this particular ladder (for instance different rung spacing might make it fail) but you can see that the robot is physically capable of lifting it’s own weight, grasping the rungs, and climbing.
An ambitious development team creating a behavior to allow NAO to play the children’s game Connect 4. See their channel for examples of NAO actually playing parts of the game. This one is a work in progress and the video represents where they want to end up. It also highlights how many complicated steps there are to things that we humans take for granted. Note also that NAOs fingers are held together with a small rubber band to allow him to hold the Connect 4 pieces.
NAO using the 8 force sensing resistors in the bottoms of his feet to react to sideways pushing and to balance on tilting surface
Normally NAO’s joints are set to full stiffness (a setting of 1) when he executes movements. This gives the greatest control, but also uses the most power and overheats his servos the quickest. With NAO’s stiffness set to 0 he is normally limp and can be posed by hand. In this inspiring video they are apparently positioning NAO to walk then setting his stiffness to zero right as the walk cycle begins, then returning it to 1 again at the end of the animation. Check the poster’s youtube channel for more experiments of NAO walking with various stiffness settings
And of course, NAOs playing soccer. The University of Bremen team write their own walking, kicking, etc algorithms from scratch, replacing the built-in walk cycle NAO normally uses. Especially impressive this the rearward kick executed by sliding NAO’s foot over the ball in reverse.
NAO asks for help getting up. Apparently they are sensing the arm movement to initiate the standing action. Also on the second attempt, they lift just one of NAO’s arms and he responds differently.



")





